Elektroautos ohne Fahrer
E-Mobile parken künftig eigenständig und finden auch ohne Fahrer die nächste Ladestation. Forscher arbeiten am Elektrowagen, der Kurzstrecken autonom zurücklegt. Auf Basis kostengünstiger Sensoren entwickeln sie ein dynamisches Modell, das die Umgebungssituation erfasst.
28.11.2014
![]()
![]()
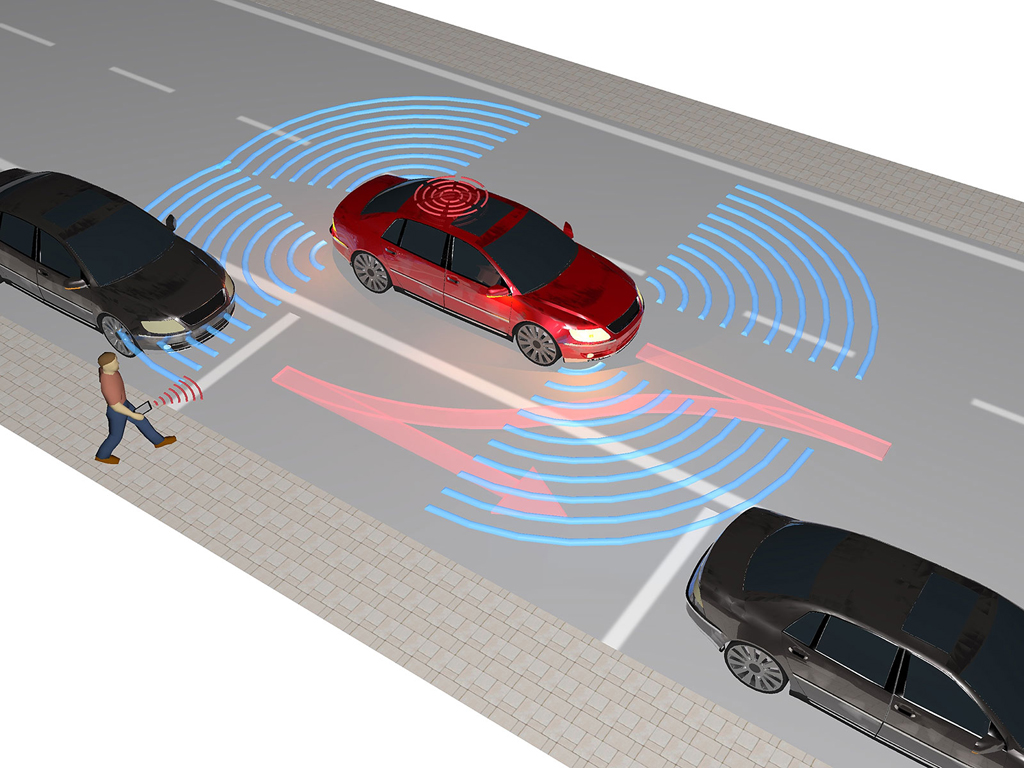
Wer vor zwanzig Jahren seinen Führerschein gemacht hat und sich heute erstmals wieder in ein Auto setzt, reibt sich verwundert die Augen. Elektronische Helfer warnen beim Einparken vor einer Kollision und halten im Stau den nötigen Abstand zum vorausfahrenden Wagen. Es gibt Spurhalte-, Seitenwind-, Totwinkel- und Fernlicht-Assistenten, vom Antiblockiersystem ganz zu schweigen. Das Auto übernimmt Schritt für Schritt das Kommando im Cockpit. Forscher am Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA sind noch einen Schritt weiter: Sie widmen sich dem automatisierten Fahren und arbeiten an den Fahrzeugen von übermorgen, die ohne menschliche Hilfe durch den Verkehr finden. Dabei nehmen die Stuttgarter Techniker vor allem Elektroautos in den Blick.
Roboter am Steuer
Das Spezialgebiet der Forscher am IPA ist die Entwicklung von Robotern. Im Institutsgebäude steht ein Exemplar, das auf seinen vier Rädern selbstständig durch unbekanntes Terrain findet. Die Herausforderungen, die dabei zu meistern sind, ähneln denen beim automatisierten Fahren. Auch hier müssen Sensoren die Umgebung erkennen, damit das Gefährt Hindernisse umschifft und sein Ziel findet. Warum die erworbenen Erfahrungen nicht für das Auto nutzen, sagten sich die Stuttgarter. Ein interdisziplinäres Team aus Informatikern, Mathematikern, Elektrotechnikern und Mechatronikern hat deshalb vor anderthalb Jahren das Projekt AFKAR (Autonomes Fahren und intelligentes Karosseriekonzept für ein All-ElectRic Vehicle) ins Leben gerufen.
Parklücke selbstständig finden
In einem ersten Schritt soll das Elektroauto lernen, eine Parklücke zu finden und ohne Schramme einzuparken. Dahinter steckt die Idee, dass der Wagen in der Lage sein soll, sich ohne menschliche Hilfe mit Strom zu versorgen. Das wäre vor allem für das Carsharing wichtig. Folgendes Szenario ist denkbar: Der Fahrer stellt den Wagen in einem entsprechend ausgerüsteten Parkhaus einfach auf einen beliebigen freien Stellplatz. Alles Weitere erledigt das Auto selbst. Es kommuniziert über eine drahtlose Schnittstelle mit der Ladestation und dem Parkhaus-Management. Dabei teilt es Informationen über seinen Ladestand und seinen Standort mit. Ist der Akku leer und eine Stromtankstelle frei, rangiert es in die entsprechende Parkbucht und wird induktiv, ohne Kabel, aufgeladen. Dann macht es Platz für das nächste Elektroauto und rollt auf eine freie Parkfläche. So ließen sich die wenigen vorhandenen Ladeplätze effektiv nutzen.
Notwendige Technik ist verfügbar
"Die nötige Technologie für dieses Szenario ist heute schon verfügbar", sagt AFKAR Projektleiter Benjamin Maidel. Er verweist auf die Roboter des Instituts, die sich in einer bekannten Umgebung wie einer Fabrikhalle problemlos zurechtfinden. Der Aufwand, ein Auto entsprechend umzubauen, ist nicht groß. Viele moderne Wagen verfügen bereits über die meisten Sensoren, die dafür nötig sind. Man muss die Daten, die diese Geräte sammeln, nur zusammenführen und entsprechend interpretieren, sodass sie ein Bild der Umgebung ergeben. Die Fraunhofer-Experten entwickeln derzeit mithilfe von aufwendigen Simulationsprogrammen die nötige Technologie. In Kürze wollen sie an einem Demonstrationsfahrzeug die Ergebnisse in der Praxis testen.

